One Ping Only
I’m taking CS 470 this semester at BYU. It’s an introductory course to artificial intelligence. All of our projects are centered around this game called bzrflag. It’s a game of capture the flag with multiple teams of tanks that can drive around the world and shoot at each other.
For our first project, we created a system for helping our tanks navigate around the game world. Each tank had access to a list of all the obstacles in the world, so it was easy for it to just drive around them. In real life though, this is unrealistic. Unless you’re dealing with a controlled environment, most robots won’t just know where obstacles are. Instead, they’re equipped with all kinds of sensors to help them figure out where obstacles are. This presents a new problem though, because sensors aren’t perfect. There is always some measure of “noise” involved, meaning that the sensor doesn’t always tell the truth.
It turns out that some smart people have figured our some special probability models to filter out the noise in such sensors. This is what we had to do in our latest project. Our tanks had a “sensor” that would give some sort of feedback about the state of the world, and we had to use a grid filter to filter out the noise and create a model of the actual environment.
The grid filter basically combines multiple sensor readings and eliminates the noise based on known probabilities about how much noise the sensor reading contains. Here are some pictures to illustrate:
Here’s what the game world actually looks like:

You can see each of the four teams bases on each side. The red tanks on the left are going to explore the world in the demo.
When the tanks first start exploring, here’s what their radar looks like:
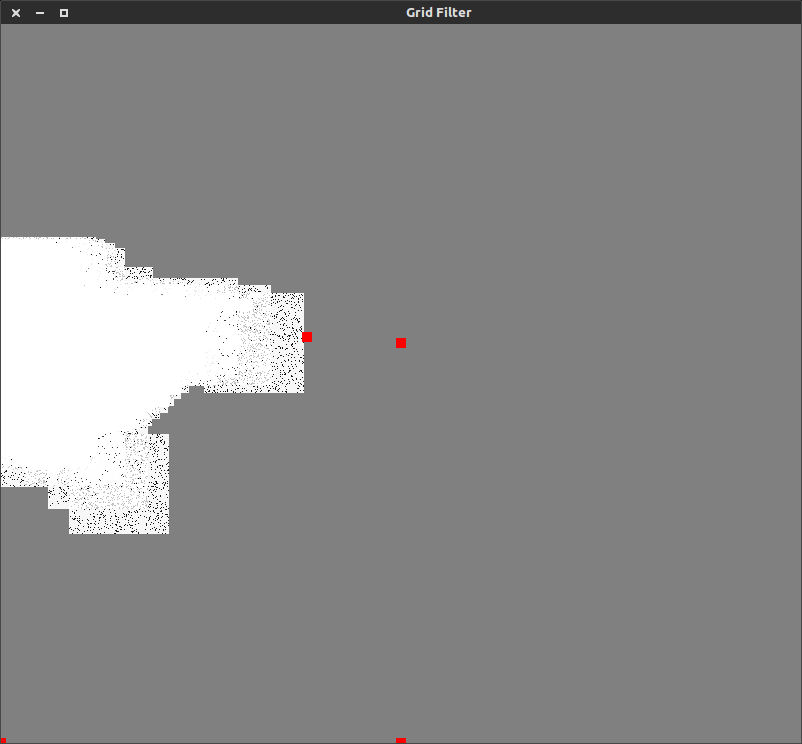
Their radar scans the world pixel-by-pixel, so the color of each pixel tells you what the tanks believe about that pixel. It’s a whole spectrum from white to black. The whiter the pixel is, the more confident the tanks are that nothing is there. The blacker the pixel is, the more confident the tanks are that there IS something there. Gray pixels mean that the tanks have no idea what is there, so that’s why most of the world is gray at first.
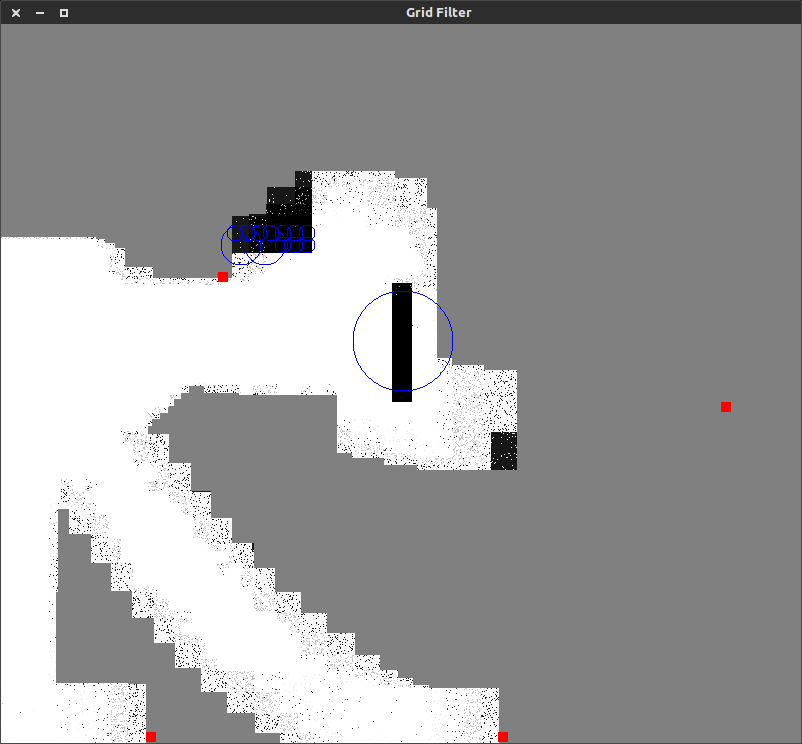
Here are a few more scans after some more time.
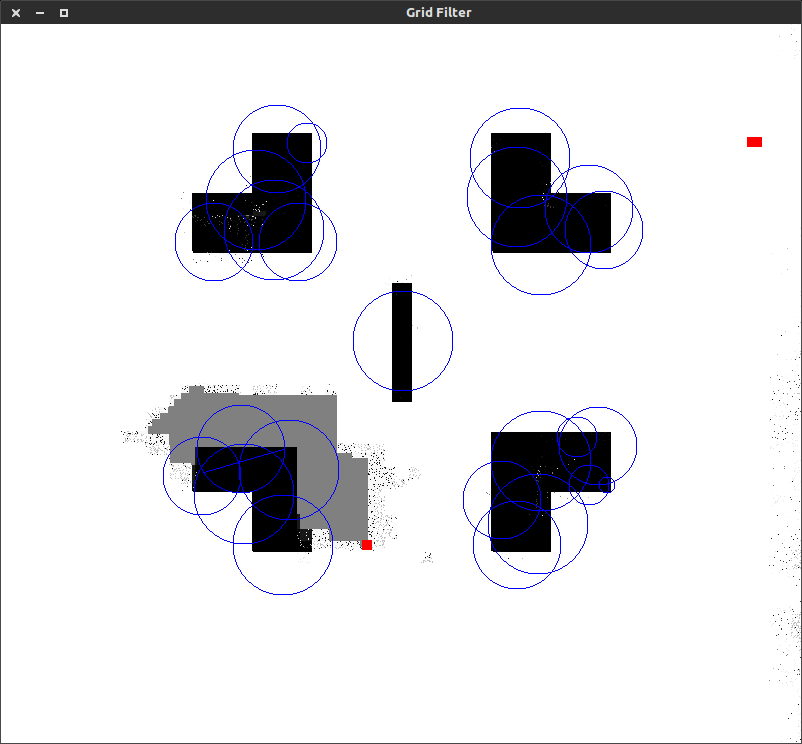
By the time they’ve explored most of the world, you can see they have a pretty solid idea of where the obstacles are. Cool, right?